Overview
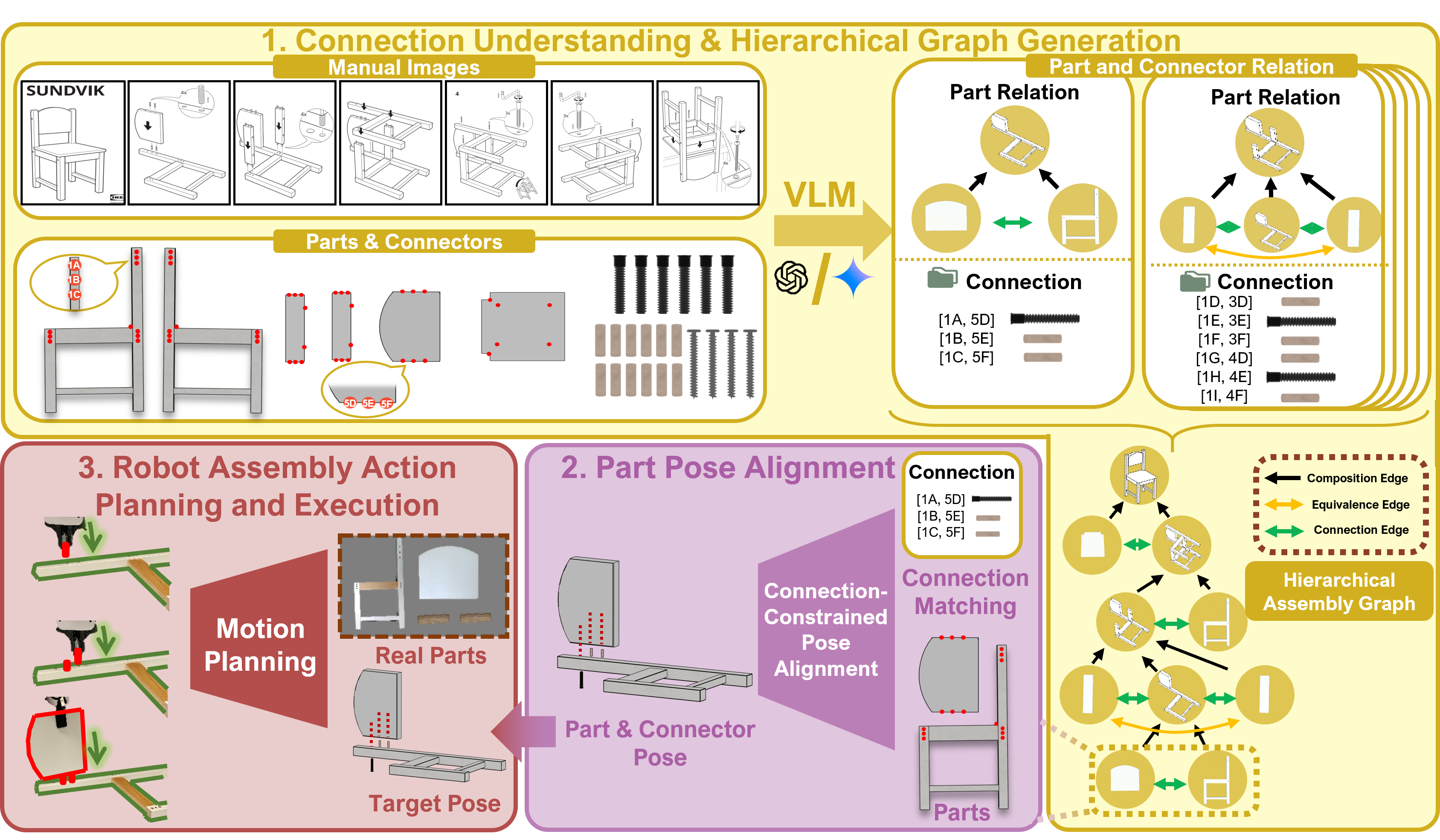
Figure 1: (1) A VLM processes manual images to extract part and connector relations, generating a connection-enriched hierarchical assembly representation. (2) The extracted connection constraints guide a geometric optimization process to compute precise target poses for parts and connectors. (3) The system executes the assembly by planning and performing robotic actions based on the connection-enriched hierarchical graph and aligned poses.
Dataset & Benchmark
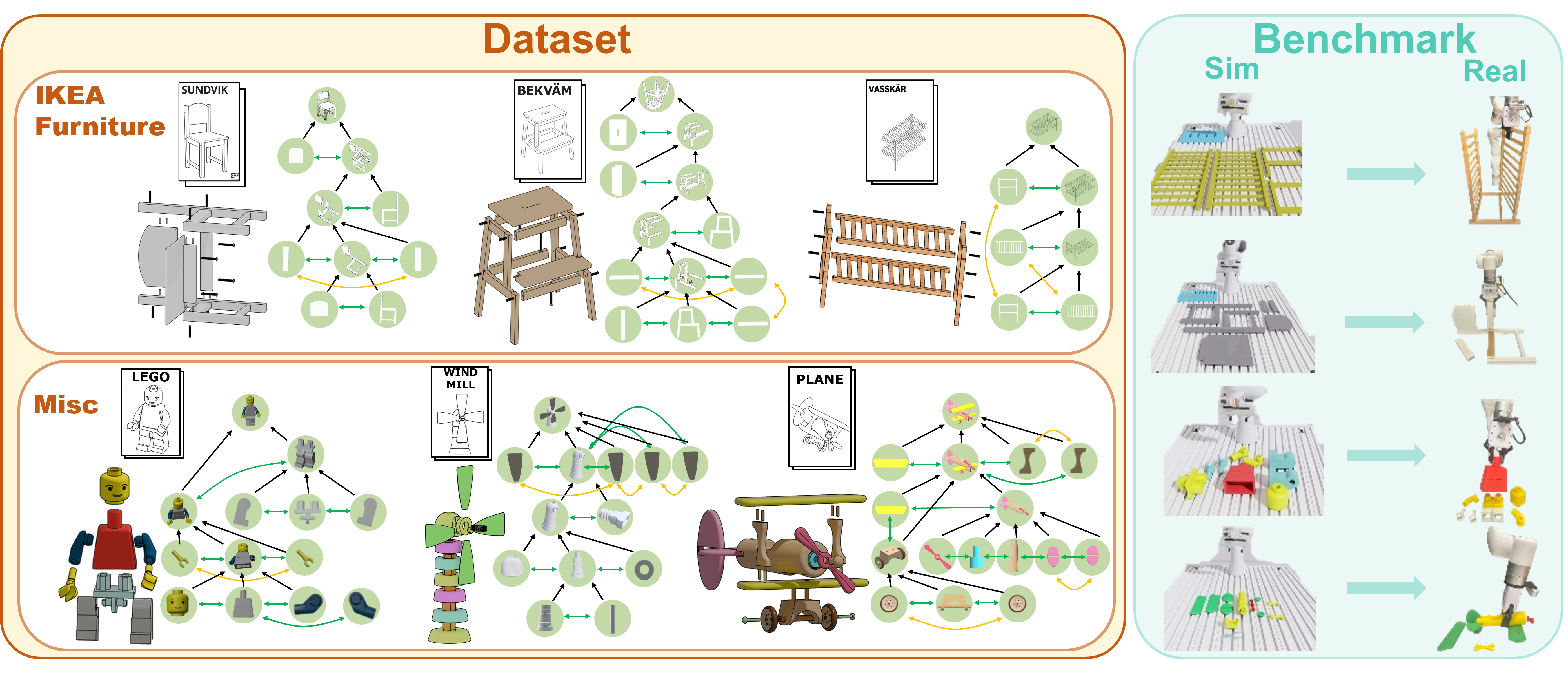
Figure 2: The dataset comprises 21 representative assembly tasks, each with high-fidelity 3D part models, manual pages for every step, and fully annotated connection information. From this collection, we selected four tasks and implemented them in Isaac Lab, designing connection mechanics to enable long-horizon assembly with explicit connector operations that directly correspond to real-world procedures.